1. Prinsip struktural sing beda
Prinsip desain saka rong model kasebut beda-beda, nyebabake struktur sing beda kanggo mesthekake sinkronisasi ing loro-lorone slider mlengkung. Mesin bending sumbu torsi nggunakake sumbu torsi kanggo nyambungake batang ayunan kiwa lan tengen kanggo mbentuk sumbu torsi sing meksa mekanisme sinkronisasi kanggo mindhah munggah lan mudhun silinder ing loro-lorone, supaya mesin bending sinkronisasi sumbu torsi minangka cara sinkronisasi sing dipeksa mekanik. , lan paralelisme panggeser ora bisa dicenthang kanthi otomatis mediasi otomatis.
Mesin mlengkung sinkron elektro-hidrolik yaiku nginstal skala magnetik (optik) ing slider lan piring tembok. Sistem kontrol numerik bisa nganalisa sinkronisasi loro-lorone slider liwat informasi umpan balik skala magnetik (optik) kapan wae. Yen ana kesalahan, sistem kontrol numerik bakal nyetel liwat tutup servo elektro-hidraulik proporsional kanggo nyinkronake stroke ing loro-lorone saka panggeser. Sistem kontrol numerik, klompok katup kontrol hidrolik lan skala magnetik minangka umpan balik kontrol loop tertutup saka mesin mlengkung sinkron elektro-hidrolik.

2. Presisi
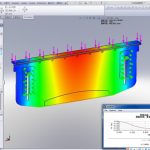
Paralelisme panggeser nemtokake amba saka workpiece. Mesin bending sinkron sumbu torsi kanthi mekanik njaga sinkronisasi slider, tanpa umpan balik kesalahan wektu nyata, lan mesin kasebut ora bisa nggawe pangaturan otomatis. Kajaba iku, kapasitas beban sebagean kurang (mesin mlengkung sinkron sumbu torsi nggunakake sumbu torsi kanggo meksa mekanisme sinkronisasi kanggo mindhah silinder ing sisih loro munggah lan mudhun. Yen beban sebagean jangka panjang bakal nyebabake sumbu torsi deform. .), Mesin bending sinkron elektro-hidrolik yaiku sistem liwat listrik proporsional. Klompok tutup cair ngontrol sinkronisasi slider, lan skala magnetik (optik) menehi umpan balik kesalahan wektu nyata. Yen ana kesalahan, sistem bakal nyetel liwat tutup proporsional kanggo njaga sinkronisasi panggeser.
3. Kacepetan
Ana rong titik ing karya mesin sing nemtokake kacepetan mlaku: (1) kacepetan panggeser, (2) kacepetan backgauge, (3) langkah mlengkung.
Torsi sumbu mesin mlengkung sinkron nggunakake 6: 1 utawa 8: 1 silinder, kang alon, nalika elektro-hydraulic mesin mlengkung sinkron nggunakake 13: 1 utawa 15: 1 silinder, kang cepet. Mulane, kacepetan mudhun cepet lan kacepetan bali saka elektro-hydraulic mesin mlengkung sinkron luwih dhuwur tinimbang torsi mesin mlengkung sinkron.
Nalika panggeser saka sumbu torsi mesin mlengkung sinkron gerakane mudhun, sanajan kacepetan nduweni fungsi cepet mudhun lan alon mudhun, cepet mudhun lan bali kacepetan mung 80mm / s, lan ngoper cepet lan alon ora Gamelan. Kacepetan mlaku saka backgauge mung 100mm / s.
Yen workpiece kudu mbengkongaken ing sawetara langkah, saben proses saka sumbu torsi mesin mlengkung sinkron kudu disetel dhewe, lan proses Processing banget cumbersome. Nanging, mesin sinkron elektro-hydraulic bisa nyetel lan nyimpen proses saben langkah liwat komputer, lan bisa dilakokno terus-terusan, kang nemen mbenakake kacepetan langkah mlengkung lan mbenakake efficiency karya.
Nalika panggeser saka elektro-hydraulic mesin mlengkung sinkron mudhun, kacepetan wis fungsi cepet mudhun lan alon mudhun. Kacepetan cepet lan bali bisa tekan 200mm / s, lan konversi cepet lan alon lancar, sing bisa ningkatake efisiensi produksi. Ing wektu sing padha, kacepetan mlaku backgauge tekan 300mm / s.
4. Kekuwatan
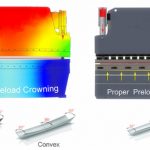
Amarga desaine dhewe, mesin mlengkung sinkron torsi ora bisa mlengkung ing beban eksentrik. Yen mbengkongaken ing beban eksentrik kanggo dangu, bakal nimbulaké batang torsi kanggo deform. Mesin mlengkung CNC elektro-hidrolik sinkron ora duwe masalah kasebut. Sumbu Y1 lan Y2 ing sisih kiwa lan tengen makarya kanthi mandiri, saengga bisa ditekuk ing beban sebagean. Efisiensi kerja mesin mlengkung sinkron elektro-hidrolik bisa padha karo loro nganti telung mesin bending sinkron sumbu torsi.
Produk sing gegandhengan
 Prinsip Kerja lan Komposisi Mesin Bending Brake Press CNC
Prinsip Kerja lan Komposisi Mesin Bending Brake Press CNC- Napa Nambah Sistem Kompensasi menyang Mesin Bending Brake Press
- Comparison lan Pilihan saka Press Brake Sistem CNC
- 4 Langkah Ngerti Sistem E21 CNC Sheet Metal Bender
- Carane Nggawe Kompensasi Deflection kanggo CNC Sheet Metal Bender
- Bengkel hidrolik tekanan hidrolik paling laris tekan hidrolik tekan ton hidrolik
- China 40 Ton Press Brake
- Aturan Operasi Aman saka Mesin Press Daya Hidrolik
- WILA Solusi Efisien saka Mlengkung Piring Sedheng lan Tebal
- Kegagalan Mekanik Umum lan Pangopènan Mesin Bending Brake Press